|TOP Page|
運動量保存の法則から任意の領域について

が成り立つ。 と、変形後の表面力
と、変形後の表面力 に表面の変化率をかけた表面力
に表面の変化率をかけた表面力 を用いて、次のように領域
を用いて、次のように領域 を変形前の領域
を変形前の領域 に戻すことができる。
に戻すことができる。

また、 と
と で定義される、第一Piola-Kirhihoffテンソル(公称応力)
で定義される、第一Piola-Kirhihoffテンソル(公称応力) を用いて、
を用いて、

第1項では積分領域が時間によって変化しなく、また も時間不変であるから、物質微分を積分の中にいれることが可能である。また、第3項にガウスの発散定理を適応して、
も時間不変であるから、物質微分を積分の中にいれることが可能である。また、第3項にガウスの発散定理を適応して、

となる。この式が任意の領域 において成り立つので、積分を取り除くことができる。
において成り立つので、積分を取り除くことができる。
| 公称応力を用いた平衡方程式 |
|---|
 |
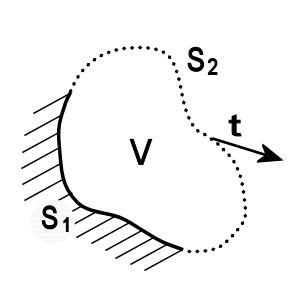
上の平衡方程式を弱形式化する。
上式の両辺に固定境界条件が設定されている面 上で0となる任意の関数
上で0となる任意の関数 をかけて領域
をかけて領域 内で積分すると、
内で積分すると、
dV")
第三項について変形を行う。
=\delta u_j\frac{\partial\Pi_{ij}}{\partial X_i}=\frac{\partial}{\partial X_i}(\delta u_j\Pi_{ij})-\frac{\partial\delta u_j}{\partial X_i}\Pi_{ij}=\nabla_X\cdot(\Pi\cdot\delta \b{u})-\Pi^T:\delta F")
これを上式に代入して、
dV-\int_V\Pi^T:\delta F dV")
右辺第二項にガウスの発散定理を適応して、
dS-\int_V\Pi^T:\delta F dV")
右辺第二項は次の関係を用いる

次のような弱形式化した平衡方程式が得られる。
| 弱形式化した平衡方程式2(第一Piola-Kirhihoff応力) |
|---|
 |
右辺第三項について次のような変換を行う。
^T : \delta \b{F} = \tr(\b{S}\cdot\b{F}^T\cdot\delta \b{F} )\\ \qquad\qquad\qquad\qquad= \tr\(\b{S}\cdot\frac{1}{2}(\b{F}^T\cdot\delta \b{F}+\delta\b{F}^T\cdot\b{F}) \) = \tr\(\b{S}\cdot\delta(\frac{1}{2}\b{F}^T\cdot\b{F}) \) = \b{S}:\delta(\frac{1}{2}\b{F}^T\cdot\b{F}) = \b{S}:\delta\b{E}")
弱形式化した平衡方程式は次のように書くことができる。
| 弱形式化した平衡方程式2(第二Piola-Kirhihoff応力) |
|---|
 |
の弱形式化した平衡方程式が2つ出てきたが、 は対称であるので後の形式で弱形式化した平衡方程式のほうが簡単であることが多い。Total-Lagrange法では通常後の弱形式化した平衡方程式を使う。
は対称であるので後の形式で弱形式化した平衡方程式のほうが簡単であることが多い。Total-Lagrange法では通常後の弱形式化した平衡方程式を使う。

のように表されるとき を内力ベクトルと呼ぶ
を内力ベクトルと呼ぶ
以下内力ベクトルを求める。
")
")
 の対称性を生かして計算を簡単にすることができる。
の対称性を生かして計算を簡単にすることができる。
ここで を次のように定義する。
を次のように定義する。

明らかに、 の対称成分は
の対称成分は である。これをテンソルとして書くと、
である。これをテンソルとして書くと、
")
つまり、ここで第二Piola-Kirhihoff応力 の対称性とテンソルの内積の性質を利用して、
の対称性とテンソルの内積の性質を利用して、
=\frac{1}{2}(\b{S}:\delta\bar{\b{E}}+\b{S}:\delta\bar{\b{E}}^T) = \frac{1}{2}(\b{S}:\delta\bar{\b{E}}+\b{S}^T:\delta\bar{\b{E}}^T) = \frac{1}{2}(\b{S}:\delta\bar{\b{E}}+\b{S}:\delta\bar{\b{E}})=\b{S}:\delta\bar{\b{E}}")
 の中の項の数は
の中の項の数は の数の半分である。
の数の半分である。 を用いることで計算が簡単になったことがわかる。
を用いることで計算が簡単になったことがわかる。
 を成分で書くと次のとおり
を成分で書くと次のとおり
F_{hj}=F_{ij}+F_{hj}Z_{hi}=\frac{\partial \delta u_i}{\partial X_j} + \frac{\partial \delta u_h}{\partial X_j}\frac{\partial u_h}{\partial X_i}")
ここで の添え字が
の添え字が になるように添え字を入れえると次のようになる。
になるように添え字を入れえると次のようになる。

ここで ,
, が次のように形状関数Nを用いて要素
が次のように形状関数Nを用いて要素 内で離散化されているとする。
内で離散化されているとする。
 、
、
![\delta \bar{E}_{gh} = \frac{\partial N^p \delta u^p_i}{\partial X_h}\delta_{ig} + \frac{\partial N^p \delta u^p_i}{\partial X_h}\frac{\partial N^r u^r_i}{\partial X_g}=\[B_{gh}\]^p_i \delta u^p_i](546F74616C204C616772616E6765_eq0053.gif "\delta \bar{E}_{gh} = \frac{\partial N^p \delta u^p_i}{\partial X_h}\delta_{ig} + \frac{\partial N^p \delta u^p_i}{\partial X_h}\frac{\partial N^r u^r_i}{\partial X_g}=\[B_{gh}\]^p_i \delta u^p_i")
ここで![\[B_{gh}\]^p_i](546F74616C204C616772616E6765_eq0054.gif "\[B_{gh}\]^p_i") は変位と歪を関係づける行列であり、
は変位と歪を関係づける行列であり、
![\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i=\frac{\partial N^p}{\partial X_h}(\delta_{ig} + \frac{\partial u_i}{\partial X_g})=\frac{\partial N^p}{\partial X_h}F_{ig}](546F74616C204C616772616E6765_eq0055.gif "\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i=\frac{\partial N^p}{\partial X_h}(\delta_{ig} + \frac{\partial u_i}{\partial X_g})=\frac{\partial N^p}{\partial X_h}F_{ig}")
| Total Lagarange法における変位と歪を対応づける行列 |
|---|
![\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i=\frac{\partial N^p}{\partial X_h}F_{ig}](546F74616C204C616772616E6765_eq0056.gif "\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i=\frac{\partial N^p}{\partial X_h}F_{ig}") |
とおいた。これを用いると要素内内力は次のようにかける。
![\{Q_e\}^p_i=\int_V_eS_{gh}\[B_{gh}\]^p_idV](546F74616C204C616772616E6765_eq0057.gif "\{Q_e\}^p_i=\int_V_eS_{gh}\[B_{gh}\]^p_idV")
内力はこれを要素ごとに足し合わせたものであり、次のようになる。
| 内力ベクトル |
|---|
 (但し要素内節点番号pの節点番号はa) (但し要素内節点番号pの節点番号はa)![\{Q_e\}^p_i=\int_V_eS_{gh}\[B_{gh}\]^p_idV](546F74616C204C616772616E6765_eq0059.gif "\{Q_e\}^p_i=\int_V_eS_{gh}\[B_{gh}\]^p_idV") |
![\delta E_{gh}=\frac{\partial E_{gh}}{\partial u^p_i}\delta u^p_i=\frac{1}{2}\(\[B_{gh}\]^p_i+\[B_{hg}\]^p_i\)\delta u^p_i](546F74616C204C616772616E6765_eq0060.gif "\delta E_{gh}=\frac{\partial E_{gh}}{\partial u^p_i}\delta u^p_i=\frac{1}{2}\(\[B_{gh}\]^p_i+\[B_{hg}\]^p_i\)\delta u^p_i")
ここで、 は任意だから消去して次の関係を得る。
は任意だから消去して次の関係を得る。
![\frac{\partial E_{gh}}{\partial u_i^p}=\frac{1}{2}\(\[B_{gh}\]^p_i+\[B_{hg}\]^p_i\)](546F74616C204C616772616E6765_eq0062.gif "\frac{\partial E_{gh}}{\partial u_i^p}=\frac{1}{2}\(\[B_{gh}\]^p_i+\[B_{hg}\]^p_i\)")
 を満たすような解を求めなければならないが、非線形有限要素法の場合、
を満たすような解を求めなければならないが、非線形有限要素法の場合、 は変位に対して非線形である。また
は変位に対して非線形である。また も非線形である場合が多い
も非線形である場合が多い
1次以上の連立方程式は計算機で解くことは不可能であるので、この非線形連立方程式を線形化して反復的に解くことで近似的にこの方程式を解く。この線形化のやり方には数々の解き方があるがもっとも良く使われるのがNewton-Raphson法である。
上の関係は となる。
となる。
ここで次のように残差ベクトル を定義する。
を定義する。

 、
、 は節点変位
は節点変位 の関数であるから、残差についても同じであるので、残差は
の関数であるから、残差についても同じであるので、残差は") のように書ける。
のように書ける。
ここで、残差が0つまり=0") の時、
の時、 は解の一つである。
は解の一つである。
さて、ある解となる変位 の周りで外力を1次の項までTayler展開したとすると、
の周りで外力を1次の項までTayler展開したとすると、
\sime{R}^a_i({u_n}^b_j)+\frac{\partial {R}^a_i({u_n}^b_j)}{\partial u^b_j}\Delta u^b_j")
と近似できる。
この近似から求められる、残差が0となるような変位 は上式の右辺を0として
は上式の右辺を0として

ここで増分量 は上式の右辺を0とした式から求められ、連立一次方程式
は上式の右辺を0とした式から求められ、連立一次方程式
+\frac{\partial {R}^a_i({u_n}^b_j)}{\partial u^b_j}\Delta {u_n}^b_j=0") つまり、
つまり、![\[-\frac{\partial {R}^a_i({u_n}^b_j)}{\partial u^b_j}\]\Delta {u_n}^b_j={R}^a_i({u_n}^b_j)](546F74616C204C616772616E6765_eq0081.gif "\[-\frac{\partial {R}^a_i({u_n}^b_j)}{\partial u^b_j}\]\Delta {u_n}^b_j={R}^a_i({u_n}^b_j)")
を解くことで得られる。
さて、変位 が解に十分近ければTaylor展開した2次以降の項の影響は小さくなり、
が解に十分近ければTaylor展開した2次以降の項の影響は小さくなり、 は解のよい近似になっているので、
は解のよい近似になっているので、 は
は よりも解に近づいていると考えられる。
よりも解に近づいていると考えられる。
ここで再び の周りで同じように1次のTaylor展開を行い解をさらに近づけることができる。反復的にこのような操作を行うことで必要とされる精度まで解を計算することをNewton-Raphson法と呼ぶ
の周りで同じように1次のTaylor展開を行い解をさらに近づけることができる。反復的にこのような操作を行うことで必要とされる精度まで解を計算することをNewton-Raphson法と呼ぶ
![[K_e]^{p,q}_{i,j} =\frac{\partial \{Q_e\}^p_i}{\partial u^q_j}](546F74616C204C616772616E6765_eq0087.gif "[K_e]^{p,q}_{i,j} =\frac{\partial \{Q_e\}^p_i}{\partial u^q_j}")
![\frac{\partial \{Q_e\}^p_i}{\partial u^q_j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_i + S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV=[{K_L}_e]^{p,q}_{i,j}+[{K_{NL}}_e]^{p,q}_{i,j}](546F74616C204C616772616E6765_eq0088.gif "\frac{\partial \{Q_e\}^p_i}{\partial u^q_j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_i + S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV=[{K_L}_e]^{p,q}_{i,j}+[{K_{NL}}_e]^{p,q}_{i,j}")
初期応力行列
![[{K_{NL}}_e]^{p,q}_{i,j} = \int_V_e S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV](546F74616C204C616772616E6765_eq0089.gif "[{K_{NL}}_e]^{p,q}_{i,j} = \int_V_e S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV")
を求めてみよう.
歪-変位関係行列![\[B_{gh}\]^p_i](546F74616C204C616772616E6765_eq0090.gif "\[B_{gh}\]^p_i") は
は
![\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i](546F74616C204C616772616E6765_eq0091.gif "\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i")
であった、これを節点変位 について微分をとってみると、第一項は消えて次のようになる。
について微分をとってみると、第一項は消えて次のようになる。
![\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j} = \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g}\delta_{ij}\delta_{rq} = \frac{\partial N^p}{\partial X_h}\frac{\partial N^q}{\partial X_g}\delta_{ij}](546F74616C204C616772616E6765_eq0093.gif "\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j} = \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g}\delta_{ij}\delta_{rq} = \frac{\partial N^p}{\partial X_h}\frac{\partial N^q}{\partial X_g}\delta_{ij}")
よって初期応力行列は次のとおり
![[{K_{NL}}_e]^{p,q}_{i,j}=\int_V_eS_{gh}\frac{\partial N^p}{\partial X_h}\frac{\partial N^q}{\partial X_g}\delta_{ij}dV](546F74616C204C616772616E6765_eq0094.gif "[{K_{NL}}_e]^{p,q}_{i,j}=\int_V_eS_{gh}\frac{\partial N^p}{\partial X_h}\frac{\partial N^q}{\partial X_g}\delta_{ij}dV")
初期変位行列
![[{K_L}_e]^{p,q}_{i,j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV](546F74616C204C616772616E6765_eq0095.gif "[{K_L}_e]^{p,q}_{i,j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV")
を求めてみよう.
まず、 を計算する。
を計算する。

の関係があるとする。これを成分で書くと、

ここで応力は歪の関数つまり変位の関数であるから ,
, に対する全微分は変位
に対する全微分は変位 についての偏微分により、次のように書ける。
についての偏微分により、次のように書ける。

これが任意の について成り立つから、両辺から消去して、
について成り立つから、両辺から消去して、

である。これを更に変更して変位と関係づけよう
![\frac{\partial S_{gh}}{\partial u^q_j}=C_{ghef}\frac{\partial E_{ef}}{\partial u^q_j}=C_{ghef}\frac{1}{2}\(\[B_{ef}\]^q_j+\[B_{fe}\]^q_j\)=\frac{1}{2}C_{ghef}\[B_{ef}\]^q_j + \frac{1}{2}C_{ghfe}\[B_{ef}\]^q_j\\ \qquad\qquad\qquad =\frac{1}{2}(C_{ghef}+C_{ghfe})\[B_{ef}\]^q_j = \bar{C}_{ghef}\[B_{ef}\]^q_j](546F74616C204C616772616E6765_eq0105.gif "\frac{\partial S_{gh}}{\partial u^q_j}=C_{ghef}\frac{\partial E_{ef}}{\partial u^q_j}=C_{ghef}\frac{1}{2}\(\[B_{ef}\]^q_j+\[B_{fe}\]^q_j\)=\frac{1}{2}C_{ghef}\[B_{ef}\]^q_j + \frac{1}{2}C_{ghfe}\[B_{ef}\]^q_j\\ \qquad\qquad\qquad =\frac{1}{2}(C_{ghef}+C_{ghfe})\[B_{ef}\]^q_j = \bar{C}_{ghef}\[B_{ef}\]^q_j")
第3式から第4式への変形は第二項について添え字 を入れ替えた。また、
を入れ替えた。また、
")
とおいた。 と
と は基本的に別物で両者を取り違えてよくバグの原因になるので注意が必要である。
は基本的に別物で両者を取り違えてよくバグの原因になるので注意が必要である。
これらを用いると初期変位行列は次のようになる。
![[{K_L}_e]^{p,q}_{i,j}=\int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV=\int_V_e\bar{C}_{ghef}\[B_{ef}\]^q_j\[B_{gh}\]^p_idV](546F74616C204C616772616E6765_eq0110.gif "[{K_L}_e]^{p,q}_{i,j}=\int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV=\int_V_e\bar{C}_{ghef}\[B_{ef}\]^q_j\[B_{gh}\]^p_idV")
以上をまとめると次のようになる。
接線剛性行列は以下のように要素接線剛性行列の和として計算される。
| 接線剛性行列 |
|---|
![[K]^{a,b}_{i,j}=\sum_e[K_e]^{p,q}_{i,j}](546F74616C204C616772616E6765_eq0111.gif "[K]^{a,b}_{i,j}=\sum_e[K_e]^{p,q}_{i,j}") (但し、 (但し、 は は の要素内節点番号) の要素内節点番号)![[K_e]^{p,q}_{i,j}=\int_V_e\bar{C}_{ghef}\[B_{ef}\]^q_j\[B_{gh}\]^p_idV + \int_V_eS_{gh}\frac{\partial N^p}{\partial X_h}\frac{\partial N^q}{\partial X_g}\delta_{ij}dV](546F74616C204C616772616E6765_eq0114.gif "[K_e]^{p,q}_{i,j}=\int_V_e\bar{C}_{ghef}\[B_{ef}\]^q_j\[B_{gh}\]^p_idV + \int_V_eS_{gh}\frac{\partial N^p}{\partial X_h}\frac{\partial N^q}{\partial X_g}\delta_{ij}dV") |
1次補間の要素を使っても被積分関数が複雑なのでよっぽど高速化に興味がない限り解析積分を使わずに数値積分を用いる。
 を求める
を求める からGreen-Lagrange歪
からGreen-Lagrange歪 を求める
を求める から物質の構成式を用いて第二Piola-Kirchhoff応力
から物質の構成式を用いて第二Piola-Kirchhoff応力 を求める
を求める から歪-変位関係行列
から歪-変位関係行列![[B]](546F74616C204C616772616E6765_eq0121.gif "[B]") を求める
を求める と歪-変位関係行列
と歪-変位関係行列![[B]](546F74616C204C616772616E6765_eq0123.gif "[B]") から要素節点等価内力ベクトル
から要素節点等価内力ベクトル を求める
を求める と第二Piola-Kirchhoff応力
と第二Piola-Kirchhoff応力 と歪-変位関係行列
と歪-変位関係行列![[B]](546F74616C204C616772616E6765_eq0127.gif "[B]") から要素剛性行列
から要素剛性行列![[K_e]](546F74616C204C616772616E6765_eq0128.gif "[K_e]") を得る。
を得る。 から要素節点等価外力ベクトル
から要素節点等価外力ベクトル を引くことで要素節点等価残差ベクトル
を引くことで要素節点等価残差ベクトル を得る。
を得る。 を求めるルーティン
を求めるルーティン


ここで、次のようにプログラムの中で変数が対応づけられているとすると、
 、edisp[a][i] =
、edisp[a][i] =  、dndx[a][i] =
、dndx[a][i] = 
変位勾配テンソルを求めるルーティンは次のとおり
double dudx[ndim][ndim];
{ // 変位勾配テンソルを求めるルーティン
for(unsigned int i=0;i<ndim*ndim;i++){ *(&dudx[0][0]+i)=0.0; }
for(unsigned int inoel=0;inoel<nnoel;inoel++){
for(unsigned int idim=0;idim<ndim;idim++){
for(unsigned int jdim=0;jdim<ndim;jdim++){
dudx[idim][jdim] += edisp[inoel][idim]*dndx[inoel][jdim];
}
}
}
}
 からGreen-Lagrange歪
からGreen-Lagrange歪 を求めるルーティンの実装例
を求めるルーティンの実装例
") である。
である。
つまり、")
ここでプログラムの中で次のように変数が対応付けれているとすると、
 、strain[i][j]=
、strain[i][j]=
変位勾配テンソルからGreen-Lagrange歪をもとめるルーティンの実装例は以下のとおり
double strain[ndim][ndim];
for(unsigned int idim=0;idim<ndim;idim++){
for(unsigned int jdim=0;jdim<ndim;jdim++){
strain[idim][jdim] = 0.5*( dudx[idim][jdim] + dudx[jdim][idim] );
for(unsigned int kdim=0;kdim<ndim;kdim++){
strain[idim][jdim] += 0.5*dudx[kdim][idim]*dudx[kdim][jdim];
}
}
}
![[B]](546F74616C204C616772616E6765_eq0144.gif "[B]") を作るルーティンの実装例
を作るルーティンの実装例
![\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i=\frac{\partial N^p}{\partial X_h}(\delta_{ig} + \frac{\partial u_i}{\partial X_g})=\frac{\partial N^p}{\partial X_h}F_{ig}](546F74616C204C616772616E6765_eq0145.gif "\[B_{gh}\]^p_i=\frac{\partial N^p}{\partial X_h}\delta_{ig} + \frac{\partial N^p}{\partial X_h}\frac{\partial N^r}{\partial X_g} u^r_i=\frac{\partial N^p}{\partial X_h}(\delta_{ig} + \frac{\partial u_i}{\partial X_g})=\frac{\partial N^p}{\partial X_h}F_{ig}")

ここでプログラム中で次のように変数が関係付けられているとすると、
 、f_mat[i][j]=
、f_mat[i][j]= 、disp2stain[p][i][g][h]=
、disp2stain[p][i][g][h]=![\[B_{gh}\]^p_i](546F74616C204C616772616E6765_eq0149.gif "\[B_{gh}\]^p_i") 、dndx[a][i] =
、dndx[a][i] = 
歪-変位関係行列を作るルーティンの実装例は次のようになる。
double disp2strain[nnoel][ndim][ndim][ndim];
{ // 歪-変位関係行列を作るルーティン
double f_mat[ndim][ndim]; // 変形勾配テンソル
// 変形勾配テンソルFを求める
for(unsigned int idim=0;idim<ndim;idim++){
for(unsigned int jdim=0;jdim<ndim;jdim++){
f_mat[idim][jdim] = dudx[idim][jdim];
}
f_mat[idim][idim] += 1.0;
}
// 変形勾配テンソルから歪-変位関係行列を作る
for(unsigned int pnoel=0;pnoel<nnoel;pnoel++){
for(unsigned int idim=0;idim<ndim;idim++){
for(unsigned int gdim=0;gdim<ndim;gdim++){
for(unsigned int hdim=0;hdim<ndim;hdim++){
disp2strain[pnoel][idim][gdim][hdim] = dndx[pnoel][hdim]*f_mat[idim][gdim];
}
}
}
}
}
 と歪-変位関係行列
と歪-変位関係行列![[B]](546F74616C204C616772616E6765_eq0152.gif "[B]") から要素節点等価内力ベクトル
から要素節点等価内力ベクトル を求めるルーティンの実装例
を求めるルーティンの実装例
![\{Q_e\}^p_i=\int_V_eS_{gh}\[B_{gh}\]^p_idV](546F74616C204C616772616E6765_eq0154.gif "\{Q_e\}^p_i=\int_V_eS_{gh}\[B_{gh}\]^p_idV")
これは数値積分を用いて次のように書くことができる。
![\{Q_e\}^p_i\sime\sum_{\alpha}\omega_{\alpha}S_{gh}\[B_{gh}\]^p_iJ_{\alpha}](546F74616C204C616772616E6765_eq0155.gif "\{Q_e\}^p_i\sime\sum_{\alpha}\omega_{\alpha}S_{gh}\[B_{gh}\]^p_iJ_{\alpha}")
ここで、次のようにプログラムの中で変数が対応づけられているとすると、

 、stress[g][h]=
、stress[g][h]= 、
、![\[B_{gh}\]^p_i](546F74616C204C616772616E6765_eq0159.gif "\[B_{gh}\]^p_i") 、
、
要素節点等価内力ベクトルを求めるルーティンの実装例は以下のとおり
// 内力を求める
for(unsigned int pnoel=0;pnoel<nnoel;pnoel++){
for(unsigned int idim=0;idim<ndim;idim++){
for(unsigned int gdim=0;gdim<ndim;gdim++){
for(unsigned int hdim=0;hdim<ndim;hdim++){
eforce_in[pnoel][idim] += detwei*stress[gdim][hdim]*disp2strain[pnoel][idim][gdim][hdim];
}
}
}
}
埋め込み座標を用いて、Total Lagrange法の定式化をしてみよう.
点 の曲座標
の曲座標 に沿ったベクトルを
に沿ったベクトルを とする.また、点
とする.また、点 が変形後に
が変形後に の位置にあるとして、曲座標
の位置にあるとして、曲座標 に沿った接ベクトルを
に沿った接ベクトルを とする.つまり、
とする.つまり、
 、
、
となる.これらは共変基底ベクトル(covariant base vector)と呼ばれる. が変形後
が変形後 となったので、変形勾配テンソルを用いると、
となったので、変形勾配テンソルを用いると、

が成り立つ.よって、
| 埋め込み座標系での変形勾配テンソル |
|---|
 |
となることがわかる.ここで は反変基底ベクトル(contravariant base vector)と呼ばれる、
は反変基底ベクトル(contravariant base vector)と呼ばれる、

を満たすベクトルである.これらを用いると、
\cdot(g_i\otimes G^i)=\(\b{g}_i\cdot\b{g}_j\)G^i\otimes G^j=g_{ij}G^i\otimes G^j")
G^i\otimes G^j=G_{ij}G^i\otimes G^j")
=\frac{1}{2}(g_{ij}-G_{ij})G^i\otimes G^j")
とかける
| 埋め込み座標系でのGreen-Lagrange歪 |
|---|
G^i\otimes G^j") |
埋め込み座標を使って、仮想歪みエネルギー式を具体的に計算してみよう.
第二Piola-Kirchhoff応力 と、Green-Lagrange歪みの変分を埋め込み座標系で成分表記すると次のようになる.
と、Green-Lagrange歪みの変分を埋め込み座標系で成分表記すると次のようになる.


成分表示された応力と仮想歪みを使った仮想歪みエネルギーは以下のとおり.
 : (\delta E_{kl}G^k\otimes G^l) = S^{ij}\delta E_{kl} (G_i\cdot G^k)(G_j\cdot G^l)=S^{ij}\delta E_{ij}")
G^i\otimes G^j = \frac{1}{2}\(\frac{\partial\delta\b{u}}{\partial r_i}\cdot \b{g}_j+\b{g}_i\cdot\frac{\partial\delta\b{u}}{\partial r_j}\)G^i\otimes G^j")
ここで、次のような非対称化した仮想歪み を考える.
を考える.
G^i\otimes G^j")
これを用いると、

となる.ここで、変位が のように離散化されているとすると、
のように離散化されているとすると、
![\delta\bar{E}_{gh} = \b{g}_g\cdot\frac{\partial\delta\b{u}}{\partial r_h} = \b{g}_g_i\frac{\partial\delta \b{u}_i}{\partial r_h} = \b{g}_g_i\frac{\partial N^p \delta u^p_i}{\partial r_h} = \(\b{g}_g_i\frac{\partial N^p}{\partial r_h}\) \delta u^p_i = \[B_{gh}\]^p_i \delta u^p_i](546F74616C204C616772616E6765_eq0188.gif "\delta\bar{E}_{gh} = \b{g}_g\cdot\frac{\partial\delta\b{u}}{\partial r_h} = \b{g}_g_i\frac{\partial\delta \b{u}_i}{\partial r_h} = \b{g}_g_i\frac{\partial N^p \delta u^p_i}{\partial r_h} = \(\b{g}_g_i\frac{\partial N^p}{\partial r_h}\) \delta u^p_i = \[B_{gh}\]^p_i \delta u^p_i")
のように書ける.ここで、![\[B_{gh}\]^p_i](546F74616C204C616772616E6765_eq0189.gif "\[B_{gh}\]^p_i") は変位と歪みを関係づけるマトリックスで
は変位と歪みを関係づけるマトリックスで
| 変位と歪みを関係づける行列 |
|---|
![\[B_{gh}\]^p_i = \b{g}_g_i\frac{\partial N^p}{\partial r_h}](546F74616C204C616772616E6765_eq0190.gif "\[B_{gh}\]^p_i = \b{g}_g_i\frac{\partial N^p}{\partial r_h}") |
である.これを用いると要素あたりの仮想歪みエネルギーの式は
![\int_{V_e} S:\delta E dV = \int_{V_e}S:\delta\bar{E} dV = \int_{V_e}S^{gh}\[B_{gh}\]^p_i dV u^p_i](546F74616C204C616772616E6765_eq0191.gif "\int_{V_e} S:\delta E dV = \int_{V_e}S:\delta\bar{E} dV = \int_{V_e}S^{gh}\[B_{gh}\]^p_i dV u^p_i")
となるので、節点等価内力 は
は
| 節点等価内力 |
|---|
![\{Q_e\}^p_i = \int_{V_e}S^{gh}\[B_{gh}\]^p_i dV](546F74616C204C616772616E6765_eq0193.gif "\{Q_e\}^p_i = \int_{V_e}S^{gh}\[B_{gh}\]^p_i dV") |
となる.
要素接線剛性行列は要素節点等価内力を変位で微分したものである.
![[K_e]^{p,q}_{i,j} =\frac{\partial \{Q_e\}^p_i}{\partial u^q_j}](546F74616C204C616772616E6765_eq0194.gif "[K_e]^{p,q}_{i,j} =\frac{\partial \{Q_e\}^p_i}{\partial u^q_j}")
![\frac{\partial \{Q_e\}^p_i}{\partial u^q_j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_i + S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV=[{K_L}_e]^{p,q}_{i,j}+[{K_{NL}}_e]^{p,q}_{i,j}](546F74616C204C616772616E6765_eq0195.gif "\frac{\partial \{Q_e\}^p_i}{\partial u^q_j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_i + S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV=[{K_L}_e]^{p,q}_{i,j}+[{K_{NL}}_e]^{p,q}_{i,j}")
以下、この2項について計算する.
初期応力行列
![[{K_{NL}}_e]^{p,q}_{i,j} = \int_V_e S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV](546F74616C204C616772616E6765_eq0196.gif "[{K_{NL}}_e]^{p,q}_{i,j} = \int_V_e S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV")
を求めてみよう.
![\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j} = \frac{\partial}{\partial u^q_j}\(\b{g}_g_i\;\frac{\partial N^p}{\partial r_h}\) = \(\frac{\partial}{\partial u^q_j}\frac{\partial (x_i + u_i)}{\partial r_g}\)\frac{\partial N^p}{\partial r_h} = \(\frac{\partial}{\partial u^q_j}\frac{\partial u_i}{\partial r_g}\)\frac{\partial N^p}{\partial r_h}](546F74616C204C616772616E6765_eq0197.gif "\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j} = \frac{\partial}{\partial u^q_j}\(\b{g}_g_i\;\frac{\partial N^p}{\partial r_h}\) = \(\frac{\partial}{\partial u^q_j}\frac{\partial (x_i + u_i)}{\partial r_g}\)\frac{\partial N^p}{\partial r_h} = \(\frac{\partial}{\partial u^q_j}\frac{\partial u_i}{\partial r_g}\)\frac{\partial N^p}{\partial r_h}")

と補間されているとすると、
\frac{\partial N^p}{\partial r_h} = \(\frac{\partial}{\partial u^q_j}\frac{\partial N^q u^q_i}{\partial r_g}\)\frac{\partial N^p}{\partial r_h} = \frac{\partial N^p}{\partial r_h}\frac{\partial N^q}{\partial r_g}\delta_{ij}")
となる.よって、
![[{K_{NL}}_e]^{p,q}_{i,j} = \int_V_e S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV = \int_V_e S_{gh}\frac{\partial N^q}{\partial r_g}\frac{\partial N^p}{\partial r_h}\delta_{ij}dV](546F74616C204C616772616E6765_eq0200.gif "[{K_{NL}}_e]^{p,q}_{i,j} = \int_V_e S_{gh}\frac{\partial \[B_{gh}\]^p_i}{\partial u^q_j}dV = \int_V_e S_{gh}\frac{\partial N^q}{\partial r_g}\frac{\partial N^p}{\partial r_h}\delta_{ij}dV")
となる.
初期変位行列
![[{K_L}_e]^{p,q}_{i,j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV](546F74616C204C616772616E6765_eq0201.gif "[{K_L}_e]^{p,q}_{i,j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV")
を求めてみよう.
まず、 を計算する.
を計算する.
ここで、微小な歪みの増分に対する応力の応答が次のように表されているとする.

ここで、 は4階のテンソルで
は4階のテンソルで

と成分表示できるとする.
 = C^{ghef}G_g\otimes G_h")
![\frac{\partial S^{gh}}{\partial u^q_j} = \frac{\partial }{\partial u^q_j} \(G^g\cdot S\cdot G^h\) = G^g\cdot\(\frac{\partial S}{\partial u^q_j}\)\cdot G^h = G^g\cdot\(\frac{\partial S}{\partial E_{ef}}\frac{\partial E_{ef}}{\partial u^q_j}\)\cdot G^h = G^g\cdot\(\frac{\partial S}{\partial E_{ef}}\)\cdot G^h \;\frac{1}{2}\([B_{ef}]^q_j+[B_{fe}]^q_j\)\\\;\;\; = G^g\cdot\(C^{ghef}G_g\otimes G_h\)\cdot G^h \;\frac{1}{2}\([B_{ef}]^q_j+[B_{fe}]^q_j\) = C^{ghef}\;\frac{1}{2}\([B_{ef}]^q_j+[B_{fe}]^q_j\)\\\;\;\; = \frac{1}{2}(C^{ghef}+C^{ghfe})[B_{ef}]^q_j = \bar{C}^{ghef}[B_{ef}]^q_j](546F74616C204C616772616E6765_eq0207.gif "\frac{\partial S^{gh}}{\partial u^q_j} = \frac{\partial }{\partial u^q_j} \(G^g\cdot S\cdot G^h\) = G^g\cdot\(\frac{\partial S}{\partial u^q_j}\)\cdot G^h = G^g\cdot\(\frac{\partial S}{\partial E_{ef}}\frac{\partial E_{ef}}{\partial u^q_j}\)\cdot G^h = G^g\cdot\(\frac{\partial S}{\partial E_{ef}}\)\cdot G^h \;\frac{1}{2}\([B_{ef}]^q_j+[B_{fe}]^q_j\)\\\;\;\; = G^g\cdot\(C^{ghef}G_g\otimes G_h\)\cdot G^h \;\frac{1}{2}\([B_{ef}]^q_j+[B_{fe}]^q_j\) = C^{ghef}\;\frac{1}{2}\([B_{ef}]^q_j+[B_{fe}]^q_j\)\\\;\;\; = \frac{1}{2}(C^{ghef}+C^{ghfe})[B_{ef}]^q_j = \bar{C}^{ghef}[B_{ef}]^q_j")
これらを代入すると、
![[{K_L}_e]^{p,q}_{i,j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV=\int_V_e\bar{C}^{ghef}\[B_{ef}\]^q_j\[B_{gh}\]^p_idV](546F74616C204C616772616E6765_eq0208.gif "[{K_L}_e]^{p,q}_{i,j} = \int_V_e\frac{\partial S_{gh}}{\partial u^q_j}\[B_{gh}\]^p_idV=\int_V_e\bar{C}^{ghef}\[B_{ef}\]^q_j\[B_{gh}\]^p_idV")
のようになる.
以上をまとめると、埋め込み座標を用いた要素接線剛性行列は次のとおり
| 接線剛性行列 |
|---|
![[K_e]^{p,q}_{i,j} = \int_V_e\bar{C}^{ghef}\[B_{gh}\]^p_i\[B_{ef}\]^q_j + S^{gh}\frac{\partial N^q}{\partial r_g}\frac{\partial N^p}{\partial r_h}\delta_{ij}dV](546F74616C204C616772616E6765_eq0209.gif "[K_e]^{p,q}_{i,j} = \int_V_e\bar{C}^{ghef}\[B_{gh}\]^p_i\[B_{ef}\]^q_j + S^{gh}\frac{\partial N^q}{\partial r_g}\frac{\partial N^p}{\partial r_h}\delta_{ij}dV") |
| 非線形有限要素法のためのテンソル解析の基礎 |
久田俊明 著 |
| Nonlinear Theory of Elasticity: Applications in Biomechanics |
Taber著 |