|TOP Page|
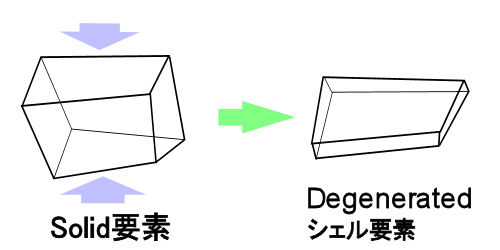
MITC(Mixed Interpolation of Tensolial Components)要素とは,Degenerateシェル要素にAssumed Strainと呼ばれる面外剪断歪の補間を入れることで,シェアロッキングを回避して,薄肉も扱えるようにしたシェル要素である.
ここではMITCを提案した論文[1]に基づいて節点のMITC要素の定式化について説明する.
Degenerate要素とは,Solid要素を一方向に圧縮したような要素である.要素内部で変位や歪が応力などがSolid要素と同じように定義できるために,いろいろな構成式を扱うことができる.ここでMITC要素の前段階としてDegenerate要素を用いたシェル要素の定式化を行う.
面内の補間関数 は次のように定義される.
は次のように定義される.
(1-r^2)\\ N^2=\frac{1}{4}(1+r^1)(1-r^2)\\ N^3=\frac{1}{4}(1+r^1)(1+r^2)\\ N^4=\frac{1}{4}(1-r^1)(1+r^2)\end{array}")
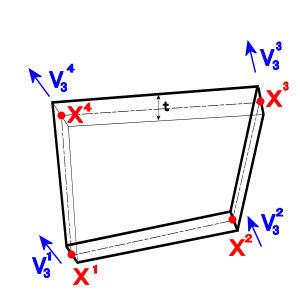
tは板の厚みを表しているとすると,次のように板の中の節点の変形前の位置 と変形後の位置
と変形後の位置 は補間される.
は補間される.
=N^p(r^1,r^2)\b{X}^p+\frac{t}{2}r^3N^p(r^1,r^2)\b{V}^p_3")
=N^p(r^1,r^2)\b{x}^p+\frac{t}{2}r^3N^p(r^1,r^2)\b{v}^p_3")
変形前と変形後の共変基底ベクトル はそれぞれ
はそれぞれ


のように表される.実際にこれを計算してみよう.
}{\partial r^1}\b{X}^p+\frac{t}{2}r^3\frac{\partial N^p(r^1,r^2)}{\partial r^1}\b{V}^p_3\\ \b{G}_2 = \frac{\partial\b{X}}{\partial r^2} = \frac{\partial N^p(r^1,r^2)}{\partial r^2}\b{X}^p+\frac{t}{2}r^3\frac{\partial N^p(r^1,r^2)}{\partial r^2}\b{V}^p_3\\ \b{G}_3 = \frac{\partial\b{X}}{\partial r^3} = \frac{t}{2}N^p(r^1,r^2)\b{V}^p_3\end{array}")
}{\partial r^1}\b{x}^p+\frac{t}{2}r^3\frac{\partial N^p(r^1,r^2)}{\partial r^1}\b{v}^p_3\\ \b{g}_2 = \frac{\partial\b{x}}{\partial r^2} = \frac{\partial N^p(r^1,r^2)}{\partial r^2}\b{x}^p+\frac{t}{2}r^3\frac{\partial N^p(r^1,r^2)}{\partial r^2}\b{v}^p_3\\ \b{g}_3 = \frac{\partial\b{x}}{\partial r^3} = \frac{t}{2}N^p(r^1,r^2)\b{v}^p_3\end{array}")
Green-Lagrange歪み は次のとおり
は次のとおり
\b{G}^i\otimes\b{G}^j = \frac{1}{2}(\b{g}_i\cdot\b{g}_j-\b{G}_i\cdot\b{G}_j)\b{G}^i\otimes\b{G}^j")
物質が超弾性体である場合は次のように第2Piola-Kirchhoff応力はGreen-Lagrange歪みから求められる.

物質がSt.Venant-Kirchhoff体である場合は次のように第2Piola-Kirchhoff応力はGreen-Lagrange歪みから求められる.
 I + 2\mu E")
 = \tr(E_i^jG^i\otimes G_j) = E_i^jG^i\cdot G_j = E_i^j \delta^i_j = E^i_i\\\;\;\;\; = G^p\cdot (E_{ij}G^i\otimes G^j)\cdot G_k = E_{ij}(G^i\cdot G^p)(G^p\cdot G_j) = E_{ij}G^{ik}\delta^p_j\\\;\;\; = E_{ij}G^{ij}")
これを用いると第二Piola-Kirchhoff応力 の反変成分は次のとおり
の反変成分は次のとおり
 G^g\cdot G^h + 2\mu G^g\cdot \b{E}\cdot G^h\\\;\; = \lambda (E_{ij}G^{ij}) G^{gh} + 2\mu G^g\cdot (E_{ij}G^i\otimes G^j)\cdot G^h\\\;\; = \lambda (E_{ij}G^{ij}) G^{gh} + 2\mu(E_{ij}G^{ig}G^{jh})")
\b{u}^p+\frac{t}{2}r^3N^p(r^1,r^2)(\b{v}^p_3-\b{V}^p_3)")
さて、変位が から
から に変化したときの増分
に変化したときの増分 について考えよう.
について考えよう.
(\b{u}^p'-\b{u}^p)+\frac{t}{2}r^3N^p(r^1,r^2)(\b{v}^p_3'-\b{v}^p_3)")
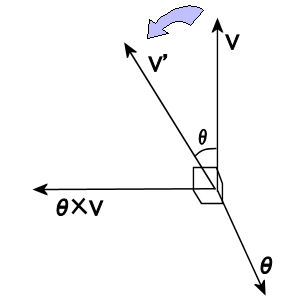
 は変形した後のディレクターのベクトルである.軸性ベクトル
は変形した後のディレクターのベクトルである.軸性ベクトル を導入すると、
を導入すると、
 + \sin|\b{\theta}^p|(\frac{\b{\theta}^p}{|\b{\theta}^p|}\times\b{v}^p_3)")
となる.これを代入すると、
\Delta\b{u}^p + \frac{t}{2}r^3N^p(r^1,r^2)\{(\cos|\b{\theta}^p|-1)(\b{v}^p_3) + \frac{\sin|\b{\theta}^p|}{|\b{\theta}^p|}(\b{\theta}^p \times\b{v}^p_3)\}")
となる.ここで節点変位 が初期状態からの変位であるのに対して
が初期状態からの変位であるのに対して が変形した後の状態からの増分であることに注意されたい.よって,興味があるのは
が変形した後の状態からの増分であることに注意されたい.よって,興味があるのは 付近での変位の挙動である.
付近での変位の挙動である. の
の 周りのテーラー展開を用いて
周りのテーラー展開を用いて

となる.これらを用いて に対して次数ごとに書き出すと
に対して次数ごとに書き出すと
\Delta\b{u}^p + \frac{t}{2}r^3N^p(r^1,r^2)\{ \underbrace{\b{\theta}^p\times\b{v}^p_3}_{1st} + \underbrace{(-\frac{1}{2}|\b{\theta}^p|^2)(\b{v}^p_3)}_{2nd} + \underbrace{\frac{1}{6}|\b{\theta}^p|^2(\b{\theta}^p \times\b{v}^p_3)}_{3rd} + \;\mathcal{O}(\theta^4)\}")
のようになる.ここでの は外積で,成分表示すると以下のようになる.
は外積で,成分表示すると以下のようになる.
![\b{\theta}^p \times \b{v}^p_3 = \[\begin{array}{lll}0 & v^p_3_3 & -v^p_3_2 \\ -v^p_3_3 & 0 & v^p_3_1 \\ v^p_3_2 & -v^p_3_1 & 0 \end{array}\]\{\begin{array}\theta^p_1\\\theta^p_2\\\theta^p_3\end{array}\} = \epsilon_{ijk}\theta^p_i {v^p_3}_j \b{e}_k](4D49544320456C656D656E74_eq0037.gif "\b{\theta}^p \times \b{v}^p_3 = \[\begin{array}{lll}0 & v^p_3_3 & -v^p_3_2 \\ -v^p_3_3 & 0 & v^p_3_1 \\ v^p_3_2 & -v^p_3_1 & 0 \end{array}\]\{\begin{array}\theta^p_1\\\theta^p_2\\\theta^p_3\end{array}\} = \epsilon_{ijk}\theta^p_i {v^p_3}_j \b{e}_k")
ここで, はレヴィ・チヴィタの記号である.
はレヴィ・チヴィタの記号である.
となる.これらを用いて、歪みや接線剛性行列を計算する.歪みを求める時は変位の1回微分、接線剛性行列を求める時は変位の2回微分が必要となる.
}{\partial r^h} = \frac{\partial\b{u}}{\partial r^h}")
}{\partial r^h}\b{e}_i")
}{\partial\theta^p_i} = \frac{\partial}{\partial \theta^p_i}\frac{\partial\b{u}}{\partial r^h} = \frac{\partial}{\partial r^h}\frac{\partial\b{u}}{\partial\theta^p_i} = \frac{t}{2}\frac{\partial r^3N^p(r^1,r^2)}{\partial r^h}\(\epsilon_{ijk} {v^p_3}_j\b{e}_k-\theta^p_i(\b{v}^p_3)+\;\mathcal{O}(\theta^2)\; \)")


}{\partial\theta^q_j\partial\theta^p_i} = \frac{\partial}{\partial \theta^q_j}\(\frac{\partial \b{g}_h(\theta)}{\partial\theta^p_i}\) = \frac{\partial}{\partial \theta^q_j}\{ \frac{t}{2}\frac{\partial r^3N^p(r^1,r^2)}{\partial r^h}\(\epsilon_{ijk} {v^p_3}_j\b{e}_k-\theta^p_i(\b{v}^p_3)+\;\mathcal{O}(\theta^2)\; \)\}\\\;\;\;\;\;\;\;\; = \frac{t}{2}\frac{\partial r^3N^p(r^1,r^2)}{\partial r^h}\(-\delta_{pq}\delta_{ij}\b{v}^p_3\;+\mathcal{O}(\theta)\;\)")
}{\partial\theta^p_i} = \frac{t}{2}\frac{\partial r^3N^p(r^1,r^2)}{\partial r^h}\epsilon_{ijk} {v^p_3}_j\b{e}_k")
}{\partial\theta^q_j\partial\theta^p_i}= -\frac{t}{2}\frac{\partial r^3N^p(r^1,r^2)}{\partial r^h}\b{v}^p_3\delta_{pq}\delta_{ij}")
 に対する角度による2階微分を考慮することで,角度の変化が大きい時に有効である.この項は特に有限回転増分項と呼ばれる.有限回転増分のMITCへの取り込みは論文[2]によってなされている.
に対する角度による2階微分を考慮することで,角度の変化が大きい時に有効である.この項は特に有限回転増分項と呼ばれる.有限回転増分のMITCへの取り込みは論文[2]によってなされている.
以降,}{\partial\theta^p_i},\;\;\frac{\partial^2 \b{g}_h(0)}{\partial\theta^q_j\partial\theta^p_i}") を簡単のため,
を簡単のため, と書く.
と書く.
これらを用いると,共変基底ベクトル の2次までの節点値の変化による変動は以下のとおり.
の2次までの節点値の変化による変動は以下のとおり.
+\mathcal{O}(u^3)")
非対称な仮想歪テンソル

とおこう.このテンソルの対称部分は仮想Green-Lagrange歪になる.
=\frac{1}{2}(\delta\bar{E}_{gh}+\delta\bar{E}_{hg})=Sym(\delta\bar{E}_{gh})")
よって仮想Green-Lagrange歪と対称なテンソルとの内積はこの非対称な仮想歪テンソルとの内積に置き換えることができる.
 = \frac{1}{2}S^{gh}\delta\bar{E}_{gh}+\frac{1}{2}S^{hg}\delta\bar{E}_{hg}= S^{gh}\delta \bar{E}_{gh}")
非対称の仮想歪テンソルは項の数が半分に減っていて扱いやすいというメリットがある.

![\delta\bar{E}_{gh} = \b{g}_g\cdot\delta\b{g}_h = \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i}\delta u^p_i + \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial \theta^p_i}\delta\theta^p_i\\\;\;\;\;\;\; = [B_{gh}^U]^p_i\delta u^p_i+[B_{gh}^R]^p_i\delta \theta^p_i](4D49544320456C656D656E74_eq0056.gif "\delta\bar{E}_{gh} = \b{g}_g\cdot\delta\b{g}_h = \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i}\delta u^p_i + \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial \theta^p_i}\delta\theta^p_i\\\;\;\;\;\;\; = [B_{gh}^U]^p_i\delta u^p_i+[B_{gh}^R]^p_i\delta \theta^p_i")
ここで
![[B_{gh}^U]^p_i = \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i} = {\b{g}_g}_i\;\frac{\partial N^p(r^1,r^2)}{\partial r^h}](4D49544320456C656D656E74_eq0057.gif "[B_{gh}^U]^p_i = \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i} = {\b{g}_g}_i\;\frac{\partial N^p(r^1,r^2)}{\partial r^h}")
![[B_{gh}^R]^p_i = \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial\theta^p_i} = {\b{g}_g}_k\;\frac{t}{2}\frac{\partial r^3N^p(r^1,r^2)}{\partial r^h}\epsilon_{ijk} {v^p_3}_j](4D49544320456C656D656E74_eq0058.gif "[B_{gh}^R]^p_i = \b{g}_g\cdot\frac{\partial \b{g}_h}{\partial\theta^p_i} = {\b{g}_g}_k\;\frac{t}{2}\frac{\partial r^3N^p(r^1,r^2)}{\partial r^h}\epsilon_{ijk} {v^p_3}_j")
とおいた.またこの![[B]](4D49544320456C656D656E74_eq0059.gif "[B]") を用いれば,
を用いれば,
![\frac{\partial E_{gh}}{\partial u^p_i} = \frac{1}{2}([B_{gh}^U]^p_i+[B_{hg}^U]^p_i)](4D49544320456C656D656E74_eq0060.gif "\frac{\partial E_{gh}}{\partial u^p_i} = \frac{1}{2}([B_{gh}^U]^p_i+[B_{hg}^U]^p_i)")
![\frac{\partial E_{gh}}{\partial u^p_i} = \frac{1}{2}([B_{gh}^R]^p_i+[B_{hg}^R]^p_i)](4D49544320456C656D656E74_eq0061.gif "\frac{\partial E_{gh}}{\partial u^p_i} = \frac{1}{2}([B_{gh}^R]^p_i+[B_{hg}^R]^p_i)")
を満たすことが容易に確認できる.
内力は以下のとおりになる.
![\{Q^U_e\}^p_i = \int_{V_e}S^{gh}\frac{\partial E_{gh}}{\partial u^p_i}dV = \int_{V_e}S^{gh}\frac{1}{2}([B_{gh}^U]^p_i+[B_{hg}^U]^p_i)dV\\\;\;\;\;\;\; = \int_{V_e}S^{gh}[B_{gh}^U]^p_idV = \int^{1}_{-1}\int^{1}_{-1}\int^{1}_{-1}S^{gh}[B_{gh}^U]^p_i J dr^3dr^2dr^1](4D49544320456C656D656E74_eq0062.gif "\{Q^U_e\}^p_i = \int_{V_e}S^{gh}\frac{\partial E_{gh}}{\partial u^p_i}dV = \int_{V_e}S^{gh}\frac{1}{2}([B_{gh}^U]^p_i+[B_{hg}^U]^p_i)dV\\\;\;\;\;\;\; = \int_{V_e}S^{gh}[B_{gh}^U]^p_idV = \int^{1}_{-1}\int^{1}_{-1}\int^{1}_{-1}S^{gh}[B_{gh}^U]^p_i J dr^3dr^2dr^1")
![\{Q^R_e\}^p_i = \int_{V_e}S^{gh}\frac{\partial E_{gh}}{\partial\theta^p_i}dV = \int_{V_e}S^{gh}\frac{1}{2}([B_{gh}^U]^p_i+[B_{hg}^U]^p_i)dV \\\;\;\;\;\;\; = \int_{V_e}S^{gh}[B_{gh}^R]^p_idV = \int^{1}_{-1}\int^{1}_{-1}\int^{1}_{-1}S^{gh}[B_{gh}^R]^p_iJ dr^3dr^2dr^1](4D49544320456C656D656E74_eq0063.gif "\{Q^R_e\}^p_i = \int_{V_e}S^{gh}\frac{\partial E_{gh}}{\partial\theta^p_i}dV = \int_{V_e}S^{gh}\frac{1}{2}([B_{gh}^U]^p_i+[B_{hg}^U]^p_i)dV \\\;\;\;\;\;\; = \int_{V_e}S^{gh}[B_{gh}^R]^p_idV = \int^{1}_{-1}\int^{1}_{-1}\int^{1}_{-1}S^{gh}[B_{gh}^R]^p_iJ dr^3dr^2dr^1")

の関係があるとする.
![\frac{\partial S^{gh}}{\partial u^q_j} = C^{ghef}\frac{\partial E_{ef}}{\partial u^q_j} = C^{ghef}\frac{1}{2}([B^U_{ef}]^q_j+[B^U_{fe}]^q_j) = \bar{C}^{ghef}[B^U_{ef}]^q_j](4D49544320456C656D656E74_eq0065.gif "\frac{\partial S^{gh}}{\partial u^q_j} = C^{ghef}\frac{\partial E_{ef}}{\partial u^q_j} = C^{ghef}\frac{1}{2}([B^U_{ef}]^q_j+[B^U_{fe}]^q_j) = \bar{C}^{ghef}[B^U_{ef}]^q_j")
![\frac{\partial S^{gh}}{\partial\theta^q_j} = C^{ghef}\frac{\partial E_{ef}}{\partial\theta^q_j} = C^{ghef}\frac{1}{2}([B^R_{ef}]^q_j+[B^R_{fe}]^q_j) = \bar{C}^{ghef}[B^R_{ef}]^q_j](4D49544320456C656D656E74_eq0066.gif "\frac{\partial S^{gh}}{\partial\theta^q_j} = C^{ghef}\frac{\partial E_{ef}}{\partial\theta^q_j} = C^{ghef}\frac{1}{2}([B^R_{ef}]^q_j+[B^R_{fe}]^q_j) = \bar{C}^{ghef}[B^R_{ef}]^q_j")
但し,
")
とおいた.
![[B]](4D49544320456C656D656E74_eq0068.gif "[B]") は節点の変位や回転と歪を関係づける行列であった.接線剛性行列を計算するために,この
は節点の変位や回転と歪を関係づける行列であった.接線剛性行列を計算するために,この![[B]](4D49544320456C656D656E74_eq0069.gif "[B]") をさらに節点値で微分することで,歪の微分を節点値から求める行列
をさらに節点値で微分することで,歪の微分を節点値から求める行列![[A]](4D49544320456C656D656E74_eq0070.gif "[A]") を作ろう.
を作ろう.
![[A^{UU}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^U_{gh}]^p_i}{\partial u^q_j} = \frac{\partial}{\partial u^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i}\) = \frac{\partial \b{g}_g}{\partial u^q_j}\frac{\partial \b{g}_h}{\partial u^p_i}](4D49544320456C656D656E74_eq0071.gif "[A^{UU}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^U_{gh}]^p_i}{\partial u^q_j} = \frac{\partial}{\partial u^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i}\) = \frac{\partial \b{g}_g}{\partial u^q_j}\frac{\partial \b{g}_h}{\partial u^p_i}")
![[A^{UR}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^U_{gh}]^p_i}{\partial\theta^q_j} = \frac{\partial}{\partial\theta^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i}\) = \frac{\partial \b{g}_h}{\partial u^p_i}\frac{\partial \b{g}_g}{\partial\theta^q_j}](4D49544320456C656D656E74_eq0072.gif "[A^{UR}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^U_{gh}]^p_i}{\partial\theta^q_j} = \frac{\partial}{\partial\theta^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial u^p_i}\) = \frac{\partial \b{g}_h}{\partial u^p_i}\frac{\partial \b{g}_g}{\partial\theta^q_j}")
![[A^{RU}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^R_{gh}]^p_i}{\partial u^q_j} = \frac{\partial}{\partial u^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial\theta^p_i}\) = \frac{\partial \b{g}_g}{\partial u^q_j}\frac{\partial \b{g}_h}{\partial\theta^p_i} = [A^{UR}_{hg}]^{q,p}_{j,i}](4D49544320456C656D656E74_eq0073.gif "[A^{RU}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^R_{gh}]^p_i}{\partial u^q_j} = \frac{\partial}{\partial u^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial\theta^p_i}\) = \frac{\partial \b{g}_g}{\partial u^q_j}\frac{\partial \b{g}_h}{\partial\theta^p_i} = [A^{UR}_{hg}]^{q,p}_{j,i}")
![[A^{RR}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^R_{gh}]^p_i}{\partial\theta^q_j} = \frac{\partial}{\partial\theta^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial\theta^p_i}\) = \frac{\partial \b{g}_g}{\partial\theta^q_j}\frac{\partial \b{g}_h}{\partial\theta^p_i} + \b{g}_g\cdot\frac{\partial^2 \b{g}_h}{\partial\theta^q_j\partial\theta^p_i}](4D49544320456C656D656E74_eq0074.gif "[A^{RR}_{hg}]^{p,q}_{i,j} = \frac{\partial [B^R_{gh}]^p_i}{\partial\theta^q_j} = \frac{\partial}{\partial\theta^q_j}\(\b{g}_g\cdot\frac{\partial \b{g}_h}{\partial\theta^p_i}\) = \frac{\partial \b{g}_g}{\partial\theta^q_j}\frac{\partial \b{g}_h}{\partial\theta^p_i} + \b{g}_g\cdot\frac{\partial^2 \b{g}_h}{\partial\theta^q_j\partial\theta^p_i}")
接線剛性を計算すると以下のとおり
![[K^{UU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial u^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^U_{gh}]^p_i}{\partial u^q_j} + \frac{\partial S^{gh} }{\partial u^q_j} [B^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}S^{gh}[A^{UU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^U_{ef}]^q_j[B^U_{gh}]^p_idV](4D49544320456C656D656E74_eq0075.gif "[K^{UU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial u^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^U_{gh}]^p_i}{\partial u^q_j} + \frac{\partial S^{gh} }{\partial u^q_j} [B^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}S^{gh}[A^{UU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^U_{ef}]^q_j[B^U_{gh}]^p_idV")
![[K^{UR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^U_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial S^{gh} }{\partial\theta^q_j} [B^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; =\int_{V_e}S^{gh}[A^{UR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^R_{ef}]^q_j[B^U_{gh}]^p_idV](4D49544320456C656D656E74_eq0076.gif "[K^{UR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^U_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial S^{gh} }{\partial\theta^q_j} [B^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; =\int_{V_e}S^{gh}[A^{UR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^R_{ef}]^q_j[B^U_{gh}]^p_idV")
![[K^{RU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial u^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^R_{gh}]^p_i}{\partial u^q_j} + \frac{\partial S^{gh} }{\partial u^q_j} [B^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}S^{gh}[A^{RU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^U_{ef}]^q_j[B^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = [K^{UR}]^{q,p}_{j,i}](4D49544320456C656D656E74_eq0077.gif "[K^{RU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial u^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^R_{gh}]^p_i}{\partial u^q_j} + \frac{\partial S^{gh} }{\partial u^q_j} [B^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}S^{gh}[A^{RU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^U_{ef}]^q_j[B^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = [K^{UR}]^{q,p}_{j,i}")
![[K^{RR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^R_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial S^{gh} }{\partial\theta^q_j} [B^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}S^{gh}[A^{RR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^R_{ef}]^q_j[B^R_{gh}]^p_idV](4D49544320456C656D656E74_eq0078.gif "[K^{RR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}S^{gh}\frac{\partial [B^R_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial S^{gh} }{\partial\theta^q_j} [B^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}S^{gh}[A^{RR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[B^R_{ef}]^q_j[B^R_{gh}]^p_idV")
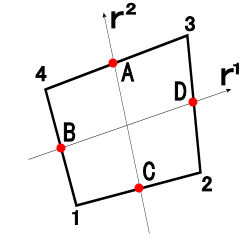
Degenerateシェルは板圧が薄くなるとロッキングが起こってしまうために,実際より硬い解を得てしまうことが知られている.これは面外剪断歪が原因であることが知られている.そこで,面外剪断歪については以下の4点における値を用いた補間によって求める.
ここで,要素内部の点を次のように一般化座標で表すと,
")
歪を補間する時に使う点は以下のとおり,
\\ \b{x}_B=\b{x}(-1,\;0,\;0)\\ \b{x}_C=\b{x}(\;0,-1,\;0)\\ \b{x}_D=\b{x}(\;1,\;0,\;0)\end{array}")
面外剪断歪みについてAssumed Strainを考える.Assumed Stainでは歪みの共変成分について再補間を行う.
E_{13}_A + \frac{1}{2}(1-r^2)E_{13}_C\\ \hat{E}_{23} = \hat{E}_{32} = \frac{1}{2}(1+r^1)E_{23}_D + \frac{1}{2}(1-r^1)E_{23}_B")
これらを用いるとAssumed Strainを考慮したGreen-Lagrange歪み は次のようになる
は次のようになる
\\\;\;\;\;\; + \hat{E}_{13}(G^1\otimes G^3 + G^3\otimes G^1) + \hat{E}_{23}(G^2\otimes G^3 + G^3\otimes G^2)")
Assumed Strainを考慮した歪から応力を求める.

 G^{gh} + 2\mu(\hat{E}_{ij}G^{ig}G^{jh})")
非対称な仮想歪みについても、Assumed Strainを考慮したテンソル を考えよう.このテンソルの共変成分は次のようになる.
を考えよう.このテンソルの共変成分は次のようになる.
\delta\bar{E}_{gh}_A + \frac{1}{2}(1-r^2)\delta\bar{E}_{gh}_C & \;\;\{gh\}=\{13\},\{31\}\\\;\;\\ \frac{1}{2}(1+r^1)\delta\bar{E}_{gh}_D + \frac{1}{2}(1-r^1)\delta\bar{E}_{gh}_B & \;\;\{gh\}=\{23\},\{32\}\end{array}")
ここで、変位や回転と歪みを結びつける行列![[B]](4D49544320456C656D656E74_eq0088.gif "[B]") を用いると、
を用いると、
![\delta\bar{E}_{gh}=[B_{gh}^U]^p_i\delta u^p_i+[B_{gh}^R]^p_i\delta\theta^p_i](4D49544320456C656D656E74_eq0089.gif "\delta\bar{E}_{gh}=[B_{gh}^U]^p_i\delta u^p_i+[B_{gh}^R]^p_i\delta\theta^p_i")
のように書けた.
![[\hat{B}]](4D49544320456C656D656E74_eq0090.gif "[\hat{B}]") を次のように定義すると、
を次のように定義すると、
![[\hat{B}_{gh}]^p_i=\{\;\begin{array}{ll}[B_{gh}]^p_i & \;\;\{gh\}=\{11\},\{22\},\{33\},\{12\},\{21\}\\\;\;\\ \frac{1}{2}(1+r^2){[B_{gh}]^p_i}_A + \frac{1}{2}(1-r^2){[B_{gh}]^p_i}_C & \;\;\{gh\}=\{13\},\{31\}\\\;\;\\ \frac{1}{2}(1+r^1){[B_{gh}]^p_i}_D + \frac{1}{2}(1-r^1){[B_{gh}]^p_i}_B & \;\;\{gh\}=\{23\},\{32\}\end{array}](4D49544320456C656D656E74_eq0091.gif "[\hat{B}_{gh}]^p_i=\{\;\begin{array}{ll}[B_{gh}]^p_i & \;\;\{gh\}=\{11\},\{22\},\{33\},\{12\},\{21\}\\\;\;\\ \frac{1}{2}(1+r^2){[B_{gh}]^p_i}_A + \frac{1}{2}(1-r^2){[B_{gh}]^p_i}_C & \;\;\{gh\}=\{13\},\{31\}\\\;\;\\ \frac{1}{2}(1+r^1){[B_{gh}]^p_i}_D + \frac{1}{2}(1-r^1){[B_{gh}]^p_i}_B & \;\;\{gh\}=\{23\},\{32\}\end{array}")
これを用いるとAssumed Strainを考慮した仮想歪みは
![\delta\hat{\bar{E}}_{gh}=[\hat{B}_{gh}^U]^p_i\delta u^p_i+[\hat{B}_{gh}^R]^p_i\delta\theta^p_i](4D49544320456C656D656E74_eq0092.gif "\delta\hat{\bar{E}}_{gh}=[\hat{B}_{gh}^U]^p_i\delta u^p_i+[\hat{B}_{gh}^R]^p_i\delta\theta^p_i")
のように一貫して書くことができる.
AssumedStainを考慮した歪を使うと,内力は次のようになる.
![\{Q^U_e\}^p_i = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{E}_{gh}}{\partial u^p_i}dV = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{\bar{E}}_{gh}}{\partial u^p_i}dV = \int_{V_e}\hat{S}^{gh}[\hat{B}_{gh}^U]^p_idV](4D49544320456C656D656E74_eq0093.gif "\{Q^U_e\}^p_i = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{E}_{gh}}{\partial u^p_i}dV = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{\bar{E}}_{gh}}{\partial u^p_i}dV = \int_{V_e}\hat{S}^{gh}[\hat{B}_{gh}^U]^p_idV")
![\{Q^R_e\}^p_i = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{E}_{gh}}{\partial\theta^p_i}dV = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{\bar{E}}_{gh}}{\partial\theta^p_i}dV = \int_{V_e}\hat{S}^{gh}[\hat{B}_{gh}^R]^p_idV](4D49544320456C656D656E74_eq0094.gif "\{Q^R_e\}^p_i = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{E}_{gh}}{\partial\theta^p_i}dV = \int_{V_e}\hat{S}^{gh}\frac{\partial\hat{\bar{E}}_{gh}}{\partial\theta^p_i}dV = \int_{V_e}\hat{S}^{gh}[\hat{B}_{gh}^R]^p_idV")

![\frac{\partial\hat{S}^{gh}}{\partial u^q_j} = C^{ghef}\frac{\partial\hat{E}_{ef}}{\partial u^q_j} = C^{ghef}\frac{1}{2}([\hat{B}^U_{ef}]^q_j+[\hat{B}^U_{fe}]^q_j) = \bar{C}^{ghef}[\hat{B}^U_{ef}]^q_j](4D49544320456C656D656E74_eq0096.gif "\frac{\partial\hat{S}^{gh}}{\partial u^q_j} = C^{ghef}\frac{\partial\hat{E}_{ef}}{\partial u^q_j} = C^{ghef}\frac{1}{2}([\hat{B}^U_{ef}]^q_j+[\hat{B}^U_{fe}]^q_j) = \bar{C}^{ghef}[\hat{B}^U_{ef}]^q_j")
![\frac{\partial\hat{S}^{gh}}{\partial\theta^q_j} = C^{ghef}\frac{\partial\hat{E}_{ef}}{\partial\theta^q_j} = C^{ghef}\frac{1}{2}([\hat{B}^R_{ef}]^q_j+[\hat{B}^R_{fe}]^q_j) = \bar{C}^{ghef}[\hat{B}^R_{ef}]^q_j](4D49544320456C656D656E74_eq0097.gif "\frac{\partial\hat{S}^{gh}}{\partial\theta^q_j} = C^{ghef}\frac{\partial\hat{E}_{ef}}{\partial\theta^q_j} = C^{ghef}\frac{1}{2}([\hat{B}^R_{ef}]^q_j+[\hat{B}^R_{fe}]^q_j) = \bar{C}^{ghef}[\hat{B}^R_{ef}]^q_j")
歪を微分したものにもAssumed Strainを考慮しよう.
![[\hat{A}_{gh}]^{p,q}_{i,j}=\{\;\begin{array}{ll}[A_{gh}]^{p,q}_{i,j} & \;\;\{gh\}=\{11\},\{22\},\{33\},\{12\},\{21\}\\\;\;\\ \frac{1}{2}(1+r^2){[A_{gh}]^{p,q}_{i,j}}_A + \frac{1}{2}(1-r^2){[A_{gh}]^{p,q}_{i,j}}_C & \;\;\{gh\}=\{13\},\{31\}\\\;\;\\ \frac{1}{2}(1+r^1){[A_{gh}]^{p,q}_{i,j}}_D + \frac{1}{2}(1-r^1){[A_{gh}]^{p,q}_{i,j}}_B & \;\;\{gh\}=\{23\},\{32\}\end{array}](4D49544320456C656D656E74_eq0098.gif "[\hat{A}_{gh}]^{p,q}_{i,j}=\{\;\begin{array}{ll}[A_{gh}]^{p,q}_{i,j} & \;\;\{gh\}=\{11\},\{22\},\{33\},\{12\},\{21\}\\\;\;\\ \frac{1}{2}(1+r^2){[A_{gh}]^{p,q}_{i,j}}_A + \frac{1}{2}(1-r^2){[A_{gh}]^{p,q}_{i,j}}_C & \;\;\{gh\}=\{13\},\{31\}\\\;\;\\ \frac{1}{2}(1+r^1){[A_{gh}]^{p,q}_{i,j}}_D + \frac{1}{2}(1-r^1){[A_{gh}]^{p,q}_{i,j}}_B & \;\;\{gh\}=\{23\},\{32\}\end{array}")
とおくと,
![\frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial u^q_j} = [\hat{A}^{UU}_{hg}]^{p,q}_{i,j}\;\;\;\; \frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial\theta^q_j} = [\hat{A}^{UR}_{hg}]^{p,q}_{i,j}\;\;\;\; \frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial u^q_j} = [\hat{A}^{RU}_{hg}]^{p,q}_{i,j}\;\;\;\; \frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial\theta^q_j} = [\hat{A}^{RR}_{hg}]^{p,q}_{i,j}](4D49544320456C656D656E74_eq0099.gif "\frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial u^q_j} = [\hat{A}^{UU}_{hg}]^{p,q}_{i,j}\;\;\;\; \frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial\theta^q_j} = [\hat{A}^{UR}_{hg}]^{p,q}_{i,j}\;\;\;\; \frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial u^q_j} = [\hat{A}^{RU}_{hg}]^{p,q}_{i,j}\;\;\;\; \frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial\theta^q_j} = [\hat{A}^{RR}_{hg}]^{p,q}_{i,j}")
接線剛性を計算すると以下のとおり
![[K^{UU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial u^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial u^q_j} + \frac{\partial\hat{S}^{gh} }{\partial u^q_j} [\hat{B}^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}\hat{S}^{gh}[\hat{A}^{UU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^U_{ef}]^q_j[\hat{B}^U_{gh}]^p_idV](4D49544320456C656D656E74_eq0100.gif "[K^{UU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial u^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial u^q_j} + \frac{\partial\hat{S}^{gh} }{\partial u^q_j} [\hat{B}^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}\hat{S}^{gh}[\hat{A}^{UU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^U_{ef}]^q_j[\hat{B}^U_{gh}]^p_idV")
![[K^{UR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial\hat{S}^{gh} }{\partial\theta^q_j} [\hat{B}^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; =\int_{V_e}\hat{S}^{gh}[\hat{A}^{UR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^R_{ef}]^q_j[\hat{B}^U_{gh}]^p_idV](4D49544320456C656D656E74_eq0101.gif "[K^{UR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^U_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^U_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial\hat{S}^{gh} }{\partial\theta^q_j} [\hat{B}^U_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; =\int_{V_e}\hat{S}^{gh}[\hat{A}^{UR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^R_{ef}]^q_j[\hat{B}^U_{gh}]^p_idV")
![[K^{RU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial u^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial u^q_j} + \frac{\partial\hat{S}^{gh} }{\partial u^q_j} [\hat{B}^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}\hat{S}^{gh}[\hat{A}^{RU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^U_{ef}]^q_j[\hat{B}^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = [K^{UR}]^{q,p}_{j,i}](4D49544320456C656D656E74_eq0102.gif "[K^{RU}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial u^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial u^q_j} + \frac{\partial\hat{S}^{gh} }{\partial u^q_j} [\hat{B}^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}\hat{S}^{gh}[\hat{A}^{RU}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^U_{ef}]^q_j[\hat{B}^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = [K^{UR}]^{q,p}_{j,i}")
![[K^{RR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial\hat{S}^{gh} }{\partial\theta^q_j} [\hat{B}^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}\hat{S}^{gh}[\hat{A}^{RR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^R_{ef}]^q_j[\hat{B}^R_{gh}]^p_idV](4D49544320456C656D656E74_eq0103.gif "[K^{RR}_e]^{p,q}_{i,j} = \frac{\partial \{Q^R_e\}^p_i}{\partial\theta^q_j} = \int_{V_e}\hat{S}^{gh}\frac{\partial [\hat{B}^R_{gh}]^p_i}{\partial\theta^q_j} + \frac{\partial\hat{S}^{gh} }{\partial\theta^q_j} [\hat{B}^R_{gh}]^p_idV\\\;\;\;\;\;\;\;\;\;\; = \int_{V_e}\hat{S}^{gh}[\hat{A}^{RR}_{hg}]^{p,q}_{i,j} + \bar{C}^{ghef}[\hat{B}^R_{ef}]^q_j[\hat{B}^R_{gh}]^p_idV")
| 非線形有限要素法のためのテンソル解析の基礎 |
久田俊明 著 |
| Nonlinear Theory of Elasticity: Applications in Biomechanics |
Taber著 |