|TOP Page|
線形弾性体では線形歪 を次のように表す。
を次のように表す。
")
")
ここで は無変形状態からの変位である。
は無変形状態からの変位である。
等方な線形弾性体の応力 は線形な歪をもとにして次のように書ける。
は線形な歪をもとにして次のように書ける。
\b{I}+2\mu\b{\epsilon}")
但し、 、
、 は
は の定数である。これを成分で書くと次のとおり、
の定数である。これを成分で書くと次のとおり、

また、 、
、 はヤング率
はヤング率 やポアソン比
やポアソン比 と次のような関係がある。
と次のような関係がある。
(1-2\nu)}") 、
、}")
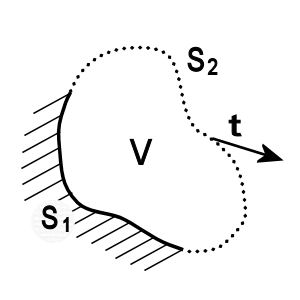
S1上では変位が固定されている。
")
このような境界条件を固定境界条件、変位境界条件と呼ぶ。
S2上では応力がかかっている。
")
このような境界条件を応力境界条件と呼ぶ。
線形弾性体では基本的に平衡方程式を変形して弱形式化を行うが、そこでは数々の近似を行う。大きな変形を取り扱う場合は元の平衡方程式を大きく変えてしまうのでずれてしまう。しかし、微小な変形ではその影響が少ない。
Cauchyの第一原理より

静的な釣り合い状態にある物体は加速度が0なので次の式を満たす

これを弱形式化するために、 上で0となる任意の関数
上で0となる任意の関数 を両辺に掛け、変形前の領域
を両辺に掛け、変形前の領域 で積分してみる。
で積分してみる。
dV=\int_V\delta u\cdot\rho\b{g}dV")
左辺第一項の被積分関数について変形を行う
=\delta u_j\frac{\partial\sigma_{ij}}{\partial x_i}\sime\delta u_j\frac{\partial\sigma_{ij}}{\partial X_i}=\frac{\partial}{\partial X_i}(\delta u_j\sigma_{ij})-\frac{\partial\delta u_j}{\partial X_i}\sigma_{ij}\\ \qquad\qquad\qquad\qquad =\frac{\partial}{\partial X_i}(\delta u_j\sigma_{ij})-\frac{1}{2}(\frac{\partial\delta u_j}{\partial X_i}+\frac{\partial\delta u_i}{\partial X_j})\sigma_{ij}=\frac{\partial}{\partial X_i}(\delta u_j\sigma_{ij})-\delta\epsilon_{ij}\sigma_{ij}\\ \qquad\qquad\qquad\qquad =\nabla\cdot(\sigma\cdot\delta\b{u})-\delta\b{\epsilon}:\b{\sigma}")
これを代入すると
-\delta\b{\epsilon}:\b{\sigma}dV=\int_V\delta u\cdot\rho\b{g}dV")
左辺の被積分関数第1項を右辺に移動させて
dV")
ガウスの発散定理を右辺第2項に適応して、
dS")
右辺第二項について変形を行う。
dS=\int_{S_2}N\cdot(\sigma\cdot\delta\b{u})dS\sime\int_{S_2}\b{n}\cdot(\sigma\cdot\delta\b{u})dS=\int_{S_2}\delta\b{u}\cdot\sigma^T\cdot\b{n}dS=\int_{S_2}\delta\b{u}\cdot\b{t}dS")
これを代入すると最終的に弱形式化された問題は次のようになる。
| 弱形式化された支配方程式 |
|---|
 \}\\ \b{u}=\bar{\b{u}}\qquad (\quad on \quad S_1 \quad)\end{array}") |
上の式で弱形式化はできたわけであるが、変位を変数として解くので、上の弱形式の方程式を変位が入った式に変形しなければならない。
応力に線形弾性体の構成式を代入して、
\b{I}+2\mu\b{\epsilon}):\delta\b{\epsilon}dV=\int_V\rho\delta\b{u}\cdot\b{g}dV+\int_{S_2}\delta\b{u}\cdot\b{t}dS")
(\tr\b{\delta\epsilon})+2\mu\b{\epsilon}:\delta\b{\epsilon}dV=\int_V\rho\delta\b{u}\cdot\b{g}dV+\int_{S_2}\delta\b{u}\cdot\b{t}dS")
 、
、 に総和規約を適応して成分で書くと次のようになる。
に総和規約を適応して成分で書くと次のようになる。

\frac{1}{2}\(\frac{\partial \delta u_i}{\partial X_j}+\frac{\partial \delta u_j}{\partial X_i}\)dV=\int_V\rho\delta u_i g_idV+\int_{S_2}\delta u_i t_idS")
左辺被積分関数中の第2項を展開して
dV=\int_V\rho\delta u_i g_idV+\int_{S_2}\delta u_i t_idS")
 の添え字が
の添え字が に
に の添え字が
の添え字が になるように添え字を入れ替えると次のとおり
になるように添え字を入れ替えると次のとおり
| 変位を元に弱形式化された支配方程式 |
|---|
dV=\int_V\rho\delta u_i g_idV+\int_{S_2}\delta u_i t_idS\quad\{ \delta\b{u} \mid \delta\b{u}=0 \quad (on \quad S_1) \}\\ \b{u}=\bar{\b{u}}\qquad (\quad on \quad S_1 \quad)\end{array}") |
dV=\int_V\rho\delta u_i g_idV+\int_{S_2}\delta u_i t_idS")
上式は積分で書かれている。積分とはつまり和であるので積分領域を分割してた中で積分を実行し、それを足し合わせて上式を計算してもよい。
そこで を要素分割した領域を
を要素分割した領域を 、
、 を要素分割した領域を
を要素分割した領域を とすると定式は次のように書ける。
とすると定式は次のように書ける。
dV = \sum_e^{nV_e}\int_{V_e}\rho\delta u_i g_idV + \sum_e^{nS_2_e}\int_{S_e}\delta u_i t_idS")
但し、 、
、 はそれぞれ
はそれぞれ と
と の要素分割数である。
の要素分割数である。
 内で関数
内で関数 は次のような形状関数
は次のような形状関数 によって離散化されているとする。
によって離散化されているとする。
但し、固定境界条件が設定されている面 上の節点
上の節点 では
では 、
、 である。
である。
 、
、
同様に 内で関数
内で関数 は次のような形状関数
は次のような形状関数 によって離散化されているとする。
によって離散化されているとする。
 、
、
これを上式に代入すると次のようになる。

ここで は節点の値であり,関数ではないので積分の外に出すことができる。それぞれ積分の外に出した後にまとめると次のようになる。
は節点の値であり,関数ではないので積分の外に出すことができる。それぞれ積分の外に出した後にまとめると次のようになる。
u^n_j \\ \qquad \qquad = \delta u^m_i \( \sum_e^{nV_e}\int_{V_e}\rho \b{N}^m g_idV + \sum_e^{nS_2_e}\int_{S_e} \bar{\b{N}}^m t_idS\)")
これは次のように行列表記できる。

 (但し、要素内節点番号a,bは全体節点番号m,n)
(但し、要素内節点番号a,bは全体節点番号m,n)
| 線形弾性体の要素剛性行列 |
|---|
 |

アイソパラメトリック要素では積分点 における被積分関数を計算し、それぞれヤコビアン
における被積分関数を計算し、それぞれヤコビアン と重み
と重み をかけて、積分点ごとに足し合わせることで積分を行う。
をかけて、積分点ごとに足し合わせることで積分を行う。
J_{\alpha}")
もちろん被積分関数は積分ごとに異なる値をとる。
積分点ごとに を計算して、被積分関数を求めなければならない。
を計算して、被積分関数を求めなければならない。
積分ごとの値を足し合わせる部分のプログラムを参考までに載せておく。
記号の対応は以下のとおり
 、lambda=
、lambda= 、rho=
、rho= 、g[i]=
、g[i]=
 、an[a]=
、an[a]= 、detwei=
、detwei=

// 要素剛性行列を作る
for(unsigned int inoel=0;inoel<nnoel;inoel++){
for(unsigned int jnoel=0;jnoel<nnoel;jnoel++){
double dtmp1 = 0.0;
for(unsigned int idim=0;idim<ndim;idim++){
for(unsigned int jdim=0;jdim<ndim;jdim++){
emat[inoel][jnoel][idim][jdim]
+= detwei*( lambda*dndx[inoel][idim]*dndx[jnoel][jdim]+myu*dndx[jnoel][idim]*dndx[inoel][jdim] );
}
dtmp1 += dndx[inoel][idim]*dndx[jnoel][idim];
}
for(unsigned int idim=0;idim<ndim;idim++){
emat[inoel][jnoel][idim][idim] += detwei*myu*dtmp1;
}
}
}
// 要素内外力を作る
for(unsigned int inoel=0;inoel<nnoel;inoel++){
for(unsigned int idim=0;idim<ndim;idim++){
eforce[inoel][idim] += g[idim]*rho*an[inoel]*detwei;
}
}
Cauchy応力はCauchyの第二原理から対称テンソルである。また線形歪も定義から明らかに対称テンソルである。つまり、
 、
、
テンソルはベクトルからベクトルへの線形変換であったから、行列として成分表示できる。この時の成分の数は3次元なら9個である。
しかし、このような対称テンソルの場合は独立な成分の数は6つなので次のように独立な成分の数をベクトル的に並べると、圧縮して書くことができ何かと便利である。
=\(\begin{array}\sigma_{xx}\\ \sigma_{yy}\\ \sigma_{zz}\\ \tau_{xy}\\ \tau_{xz}\\ \tau_{yz}\end{array}\)") 、
、=\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)")
剪断歪の場合だけ歪が2倍して表記していることに注意していただきたい。このように の剪断部分を2倍した
の剪断部分を2倍した を使ってベクトル表記した歪を工学歪と呼ばれる。工学では専らこちらの歪が用いられる。
を使ってベクトル表記した歪を工学歪と呼ばれる。工学では専らこちらの歪が用いられる。
剪断歪の部分を2倍にした工学歪を使うと、通常は応力テンソルと歪テンソルのテンソル積で書かれる歪エネルギー密度 を、ベクトルの内積で書くことができる。
を、ベクトルの内積で書くことができる。

線形弾性体の応力-歪関係式は次のような関係であった。

これを添え字を入れ替えて、 の添え字が
の添え字が になるようにすると
になるようにすると
\epsilon_{kl}=C_{ijkl}\epsilon_{kl}")
ここで応力と歪を関係づける、4階のテンソル は構成則テンソルと呼ばれる。
は構成則テンソルと呼ばれる。
これらを利用すると、応力、歪をテンソル表記からベクトル表記に変えた場合に応力-歪関係式は次のようになる。
![\(\begin{array}\sigma_{xx}\\ \sigma_{yy}\\ \sigma_{zz}\\ \tau_{xy}\\ \tau_{xz}\\ \tau_{yz}\end{array}\)= \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)](46454D20666F72204C696E65617220456C6173746963_eq0100.gif "\(\begin{array}\sigma_{xx}\\ \sigma_{yy}\\ \sigma_{zz}\\ \tau_{xy}\\ \tau_{xz}\\ \tau_{yz}\end{array}\)= \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)")
z方向の厚みが大きい場合などは、変位は2次元的であると考えられる。つまり、z方向の変位は小さいと考えられる。またx変位やy変位はz方向に対して一定となると考えられる。このような状態を平面歪状態と呼ぶ。
つまり、 、
、 、
、 が成り立つ。
が成り立つ。
これを用いると、 、
、 、
、 であることがわかる。
であることがわかる。
これをもちいて歪エネルギー密度 を計算する。
を計算する。
![\rho_{\b{W}}=\frac{1}{2}\{\b{\sigma\}\cdot\{\b{\epsilon\}= \frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)^T\(\begin{array}\sigma_{xx}\\ \sigma_{yy}\\ \sigma_{zz}\\ \tau_{xy}\\ \tau_{xz}\\ \tau_{yz}\end{array}\)= \frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)](46454D20666F72204C696E65617220456C6173746963_eq0108.gif "\rho_{\b{W}}=\frac{1}{2}\{\b{\sigma\}\cdot\{\b{\epsilon\}= \frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)^T\(\begin{array}\sigma_{xx}\\ \sigma_{yy}\\ \sigma_{zz}\\ \tau_{xy}\\ \tau_{xz}\\ \tau_{yz}\end{array}\)= \frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)")
ここで、 、
、 、
、 をこの式に代入すると、
をこの式に代入すると、
![\rho_{\b{W}}=\frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ 0\\ \gamma_{xy}\\ 0\\ 0\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ 0\\ \gamma_{xy}\\ 0\\ 0\end{array}\)= \frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\\ \lambda&&\lambda+2\mu&&\\ && && && \mu\\ \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)](46454D20666F72204C696E65617220456C6173746963_eq0112.gif "\rho_{\b{W}}=\frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ 0\\ \gamma_{xy}\\ 0\\ 0\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ 0\\ \gamma_{xy}\\ 0\\ 0\end{array}\)= \frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\\ \lambda&&\lambda+2\mu&&\\ && && && \mu\\ \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)")
元の3次元の式と比べると、Rameの定数を変えることなく単純に次元を3から2に減らせばいいことが分かる。
z方向の厚みが十分小さい場合は、平面応力
 、
、 、
、 が成り立つ。
が成り立つ。
歪についての関係を求めるために、次の応力-歪関係式から歪を逆算しよう。
![\(\begin{array}\sigma_{xx}\\ \sigma_{yy}\\ 0\\ \tau_{xy}\\ 0\\ 0\end{array}\)= \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)](46454D20666F72204C696E65617220456C6173746963_eq0116.gif "\(\begin{array}\sigma_{xx}\\ \sigma_{yy}\\ 0\\ \tau_{xy}\\ 0\\ 0\end{array}\)= \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \epsilon_{zz}\\ \gamma_{xy}\\ \gamma_{xz}\\ \gamma_{yz}\end{array}\)")
") 、
、 、
、 となる。
となる。
 を良く見ると負の符号がついていることにより、
を良く見ると負の符号がついていることにより、 によって圧縮(膨張)されたらz方向に膨張(圧縮)されることがわかる。面内で圧縮されると厚み方向に膨らむことがわかる。
によって圧縮(膨張)されたらz方向に膨張(圧縮)されることがわかる。面内で圧縮されると厚み方向に膨らむことがわかる。
これを用いて、歪エネルギー密度 を計算すると、
を計算すると、
![\rho_{\b{W}}=\frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ -\frac{\lambda}{\lambda+2\mu}(\epsilon_{xx}+\epsilon_{yy})\\ \gamma_{xy}\\ 0\\ 0\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ -\frac{\lambda}{\lambda+2\mu}(\epsilon_{xx}+\epsilon_{yy})\\ \gamma_{xy}\\ 0\\ 0\end{array}\)\\ \qquad\qquad\qquad=\frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)^T \[\begin{array} \lambda'+2\mu&&\lambda'&&\\ \lambda'&&\lambda'+2\mu&&\\ && && && \mu\\ \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)](46454D20666F72204C696E65617220456C6173746963_eq0123.gif "\rho_{\b{W}}=\frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ -\frac{\lambda}{\lambda+2\mu}(\epsilon_{xx}+\epsilon_{yy})\\ \gamma_{xy}\\ 0\\ 0\end{array}\)^T \[\begin{array} \lambda+2\mu&&\lambda&&\lambda\\ \lambda&&\lambda+2\mu&&\lambda\\ \lambda&&\lambda&&\lambda+2\mu\\ && && && \mu&& && \\ && && && &&\mu&& \\ && && && && &&\mu \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ -\frac{\lambda}{\lambda+2\mu}(\epsilon_{xx}+\epsilon_{yy})\\ \gamma_{xy}\\ 0\\ 0\end{array}\)\\ \qquad\qquad\qquad=\frac{1}{2}\(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)^T \[\begin{array} \lambda'+2\mu&&\lambda'&&\\ \lambda'&&\lambda'+2\mu&&\\ && && && \mu\\ \end{array}\] \(\begin{array}\epsilon_{xx}\\ \epsilon_{yy}\\ \gamma_{xy}\end{array}\)")
となる。但し、 である。
である。
Rameの定数のうち、λを見かけ上変化させた上で3次元から2次元化すればいいことがわかる。
簡単な形状をしていて、一様な歪を生じるような問題は解析的に解くことが可能である。このような単純な問題を解くことで解析プログラムが本当に正しいのか検証することができる。
次の図のように矩形の物体を引っ張って変形させる。
| 2次元単純引っ張り |
|---|
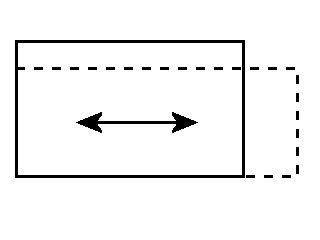 |
x方向に引っ張るとするとy方向には力が働かないのでy方向の垂直応力は0となる。

\epsilon_{yy}+\lambda\epsilon_{zz}=\lambda\epsilon_{xx}+(\lambda+2\mu)\epsilon_{yy}=0") より、
より、
 である。
である。
 となる。
となる。
\epsilon_{xx}+\lambda\epsilon_{yy}=(\lambda+2\mu)\epsilon_{xx}+\lambda(-\frac{\lambda}{\lambda+2\mu})\epsilon_{xx}=\frac{4\mu(\lambda+\mu)}{\lambda+2\mu}\epsilon_{xx}")
これから、見かけ上のヤング率 は
は
}{\lambda+2\mu}=\frac{E}{1-\nu^2}")
平面応力状態では であり、
であり、
これは3次元の単純引っ張りと一致する。
よって
 、
、
である。
線形弾性体の解析において注意することを4つほどあげると次のようになる。
以下それぞれの注意点について簡単に述べる。
ポアソン比が0.5に近づけると体積弾性率が無限に大きくなる。これは体積変化に対する反力が大きくなることを意味しており、体積変化がないという非圧縮性の拘束条件が次第に変位に付加される。
このような非圧縮の問題の場合、応力は変位から発生する応力の他に拘束力から発生する非決定応力が追加されるため、変位のみを変数として解析することがでない。そこで圧力変数を導入してこの問題を解析する。変位変数と圧力変数を用いた弾性体の解析をu/p formulationという。圧力変数を導入するために圧力節点を追加するが、圧力節点と変位節点の要素内の配置の仕方に解析がうまくパターンがあるのでそれらを採用しなければならない。
1次要素など補間関数の次数が低いときに梁など薄い構造物の曲げを解析するときに、実際よりも硬い解が得られる。これはメンブレンロッキングと呼ばれる現象で注意が必要である。
これも梁のような薄い構造物を曲げるときに面外剪断が0であるというKirchhoff条件が変位に付加させるために解の精度が悪くなってしまうのである。
高次要素を用いたり、低減積分、選択的低減積分を用いることで精度を向上させることができる。またソリッド要素をやめて構造要素を用いるのも有効な手段の一つである。
2次元梁曲げ問題のロッキング問題については以下が詳しい。
変分原理より解析解は最もポテンシャルエネルギーの低い解である。有限要素法で求める解はメッシュ上で表現できる関数に限定して、その中でもっともエネルギーの小さな解である。よって有限要素法のエネルギーは解析解のエネルギーより常に大きい。これは大雑把に言えば、有限要素法の変形や歪や応力は解析解の変形よりも小さく評価されることを意味している。有限要素法による弾性体解析の一つの目的は構造部材が破壊するかどうかである。実際よりも破壊されにくいというように評価されてしまう。これは危険である。異なるメッシュサイズの解析を行って収束を見るなど、十分に注意しなければならない。
線形弾性体の構成式は客観性をみたしていないので回転することは想定外である。線形弾性体を回転させた場合は膨張するような解が得られる。
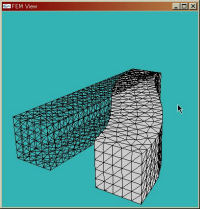
下の図は線形弾性体の片持ち梁に下向きの重力をかけて曲げたものである。回転した部分が大きく膨張して非現実的な変形をしているのがわかる。
| 線形弾性体を回転させた場合の膨張 |
|---|
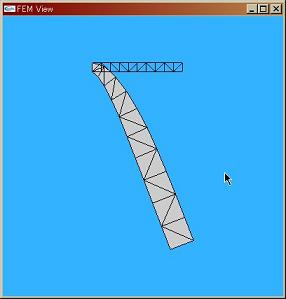 |
| 解析ソースコード >>>>LinearSolid_UnsTri.zip |
そもそも線形弾性体は微小変形微小歪問題にのみ用いるべきである。微小歪問題で大変形(つまり回転)にも対応しているのがサンブナン体である。
2次元の線形弾性体を剛体回転させた場合どうなるのかを詳しく調べてみよう。
点") を原点反時計周りに
を原点反時計周りに だけ剛体回転させた場合の座標
だけ剛体回転させた場合の座標") は、
は、
=(X\cos\theta-Y\sin\theta,X\sin\theta+Y\cos\theta)")
回転させる前の点からの変位 は
は
=(x-X,y-Y)=(X(\cos\theta-1)-Y\sin\theta,X\sin\theta+Y(\cos\theta-1))")
よって線形歪は次のようになる。



よって より等方圧縮の垂直歪が発生していることがわかる。垂直圧縮することで膨張させようとする応力が働く。梁の回転している部分には応力がかかっていないので、応力を0にするために結局、膨張した解を得ることになる。
より等方圧縮の垂直歪が発生していることがわかる。垂直圧縮することで膨張させようとする応力が働く。梁の回転している部分には応力がかかっていないので、応力を0にするために結局、膨張した解を得ることになる。
ノルムを次のように定義する
||^2_0=\int_{\Omega}\epsilon(v):\epsilon(v)d\Omega")


弱形式の線形弾性体は次のとおり
:e(\phi)d\Omega = <f,\phi>_{H^{-1},H^1(\Omega)^N}\qquad\qquad\forall\phi\in H^1_\Gamma(\Omega)^N")
ここで に
に を代入して、
を代入して、 の強圧性より
の強圧性より
||^2_0\le\int_{\Omega} A \epsilon(u):\epsilon(u)d\Omega = <f,u>_{H^{-1},H^1(\Omega)^N} \le ||f||_{H^{-1}} ||u||_1")
Kornの第一不等式よりが成り立つ。
||^2_0\qquad\qquad\forall v\in H^1(\Omega)^N")
Kornの第二不等式
||^2_0\qquad\qquad\forall v\in H^1_{\Gamma}(\Omega)^N")
が成り立つことを背理法で示す。もし上が成り立たないとすると、
 を満たしたまま
を満たしたまま
||_0=0") とすような
とすような が存在する。これを仮定して矛盾が起こることを示す。
が存在する。これを仮定して矛盾が起こることを示す。
Sovlevの埋蔵定理より 空間は
空間は 空間でコンパクトである。よって、
空間でコンパクトである。よって、
 strongly in
strongly in ^N")
となるような^N") が存在する。
が存在する。
ここでKornの不等式より
||^2_0\\\qquad\qquad\qquad\qquad\qquad\le ||v_n-v_m||^2_0+||\epsilon(v_n)||^2_0+||\epsilon(v_m)||^2_0")
 を大きくすれば右辺は好きなだけ小さくできる。よって
を大きくすれば右辺は好きなだけ小さくできる。よって は
は^N") 上のCauchy列である。よって
上のCauchy列である。よって は
は に
に^N") で収束する。
で収束する。
||_0=\lim_{n\rightarrow \infty}||\epsilon(v_n)||_0=0") であるから
であるから=0") である。
である。
 は境界
は境界 上で0であるから、
上で0であるから、 である。
である。
これは に反する。よって題意は示された。
に反する。よって題意は示された。
 のノルムの等価性
のノルムの等価性
逆の不等式が自明であるので と
と||_0") は等価なノルムであるといえる。
は等価なノルムであるといえる。
つまり、次のように、作用素の における楕円性がいえる。
における楕円性がいえる。
:\epsilon(u)d\Omega\le C ||u||^2_1")
このことから、Lax-Milgramの定理より解^N") が唯一に存在することがいえる。
が唯一に存在することがいえる。
| 非線形有限要素法のためのテンソル解析の基礎 |
久田俊明 著 |
| 連続体力学―簡明な理論と例題 (1979年) (理工学海外名著シリーズ〈31〉) |
P.チャドウィック 著 |
| テンソル解析と連続体力学 (1979年) (理工学海外名著シリーズ〈30〉) |
W.フリューゲ 著 |